

Control Predictivo Basado en Koopman
Una Evaluación Experimental en un Sistema de Cuatro Tanques Acoplados
Anteproyecto
En el marco del Grupo de Investigación IDEAS, el estudiante David Santiago Aponte Dueñas presenta su trabajo de grado titulado "Control Predictivo Basado en Koopman: Una Evaluación Experimental en un Sistema de Cuatro Tanques Acoplados" (2025), bajo la dirección del profesor Duván Téllez Castro.
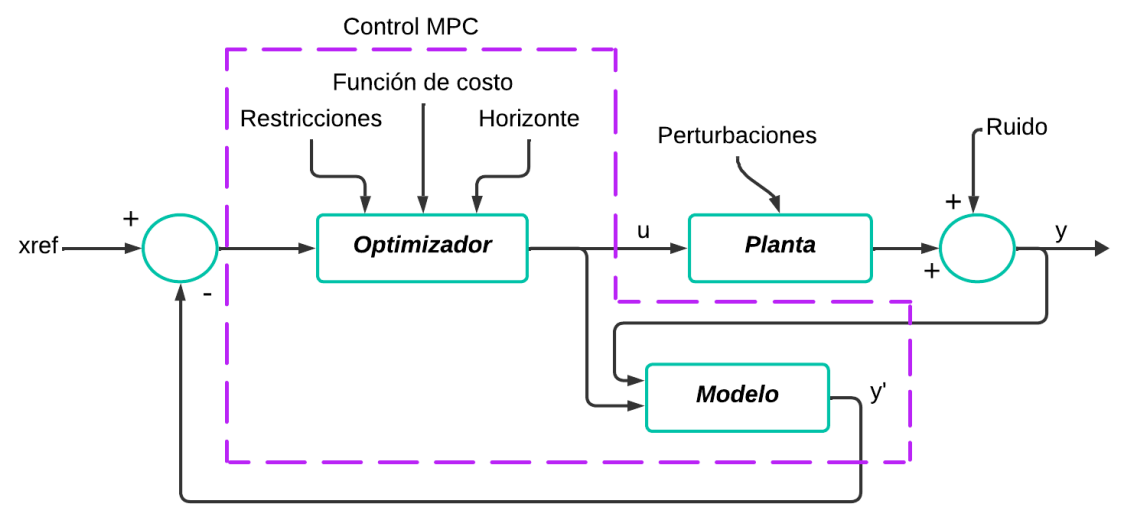
Este proyecto se enmarca en las líneas de investigación en control inteligente y modelado de sistemas dinámicos. Su propósito es implementar un controlador predictivo (MPC) apoyado en el operador de Koopman, utilizando técnicas basadas en datos para modelar el comportamiento de sistemas multivariables no lineales, como el caso del sistema experimental de cuatro tanques acoplados.
Motivación
El desarrollo de sistemas de control eficientes para procesos industriales complejos es un reto permanente en la ingeniería, especialmente cuando se trata de sistemas multivariables no lineales cuya dinámica es difícil de modelar con precisión. Muchos de estos sistemas operan bajo restricciones físicas y condiciones cambiantes que los métodos tradicionales no siempre pueden manejar de manera óptima.
La motivación de este proyecto surge de la necesidad de explorar nuevas metodologías basadas en datos que permitan diseñar controladores más flexibles y robustos, capaces de adaptarse a la complejidad y a la incertidumbre de los sistemas reales. Implementar un controlador predictivo basado en el operador de Koopman representa una oportunidad innovadora para aprovechar datos de operación, sin depender exclusivamente de modelos físicos, y así mejorar el desempeño del control en procesos industriales.
Este trabajo busca no solo aportar evidencia experimental sobre la viabilidad de estos métodos en una planta real, sino también cerrar la brecha entre la teoría y la práctica, demostrando que las técnicas modernas de aprendizaje automático pueden transformar el diseño de sistemas de control y abrir nuevas perspectivas para la automatización y la eficiencia industrial.
Impacto y proyección
Se espera que los resultados de este proyecto fortalezcan el desarrollo de controladores más robustos y adaptativos en aplicaciones industriales donde los modelos precisos son difíciles de obtener. Así mismo, demuestra el potencial del aprendizaje automático y la teoría de Koopman para impulsar la evolución del control moderno en entornos reales.
Desde el grupo IDEAS felicitamos a David por su compromiso y contribución al fortalecimiento de nuestras líneas de investigación, y reafirmamos nuestro apoyo a iniciativas que integren ciencia, tecnología e innovación al servicio de la ingeniería.













