

Diseño e Implementación de un Sistema de Balanceo de una Bola sobre un Plano
Proyecto Terminado
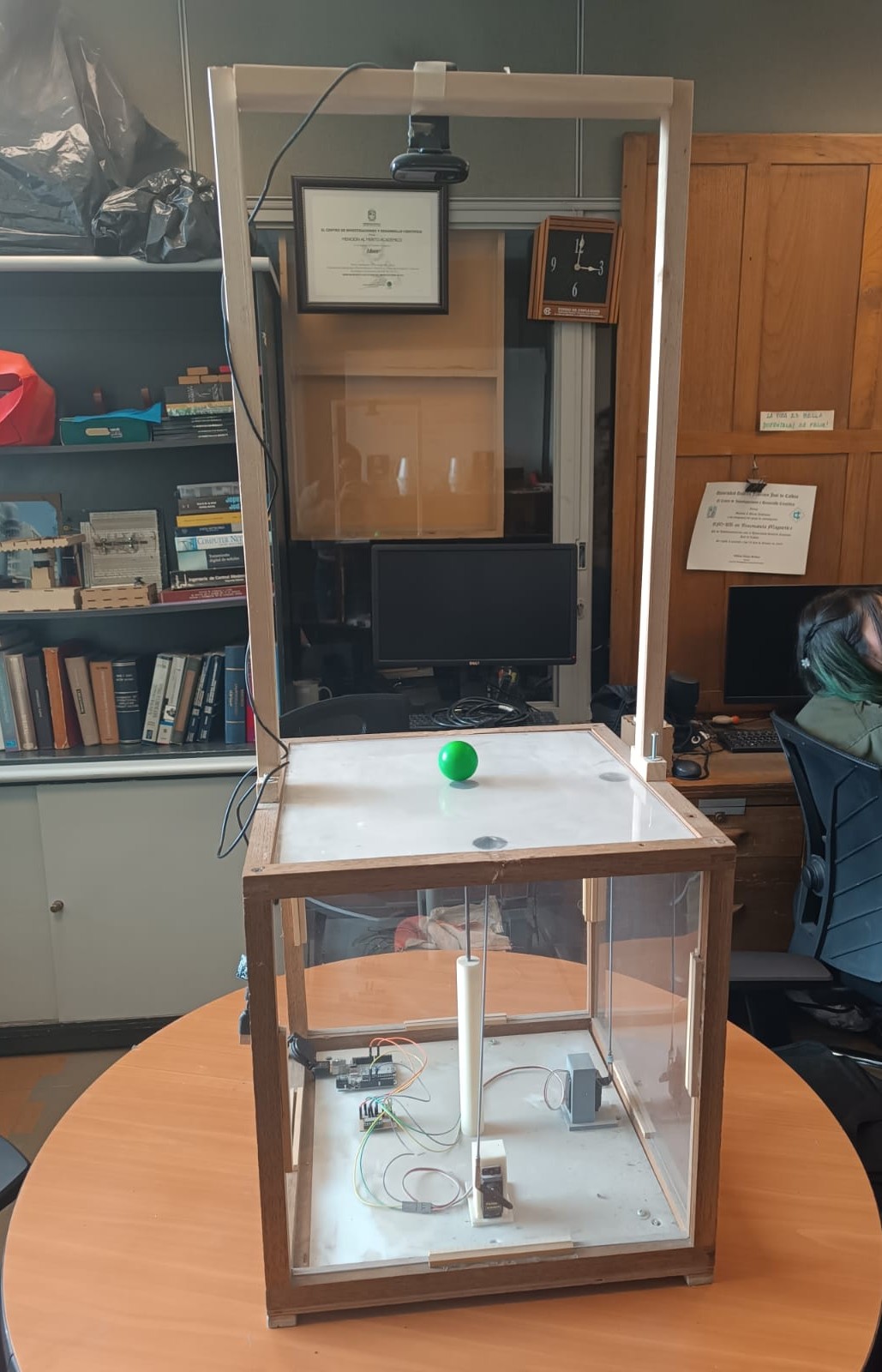
En el año 2016, los estudiantes Juan Felipe Reyes Ortiz y Diego Ochoa Polanía culminaron exitosamente su trabajo de grado titulado “Diseño e Implementación de un Sistema de Balanceo de una Bola sobre un Plano”, bajo la dirección de la profesora Diana Marcela Ovalle Martínez, PhD., en el marco del Grupo de Investigación IDEAS de la Universidad Distrital Francisco José de Caldas.
Este proyecto surgió del interés por desarrollar un sistema físico capaz de mantener el equilibrio dinámico de una bola sobre un plano inclinado, empleando técnicas modernas de censado, modelado y control. Se trató de un ejercicio aplicado en el campo de la ingeniería electrónica, particularmente en la línea de investigación en Señales y Control, con alto valor académico y didáctico.
Motivación
Los sistemas de balanceo de bolas sobre superficies son casos clásicos en la enseñanza de conceptos avanzados de control, debido a su comportamiento altamente dinámico y no lineal. Este proyecto se motivó por el interés de diseñar una herramienta educativa que permitiera comparar resultados teóricos obtenidos a partir de modelos matemáticos con los comportamientos reales de un prototipo físico, y así explorar distintas técnicas de control aplicadas a sistemas reales.
Además, el uso de tecnologías como el procesamiento digital de imágenes y la integración de interfaces gráficas buscó acercar a los estudiantes al manejo de herramientas modernas en ingeniería de control.
Objetivos y Alcance
Entre los objetivos principales se destacaron:
- Diseñar y construir físicamente el sistema de balanceo de la bola sobre un plano.
- Obtener modelos analíticos que describieran el comportamiento dinámico del sistema.
- Implementar procesamiento digital de imágenes con cámara web para determinar la posición de la bola.
- Diseñar e implementar dos estrategias de control: un controlador difuso y un controlador por realimentación de estados.
- Comparar los comportamientos simulados y reales bajo distintas técnicas de control.
Metodología y Desarrollo
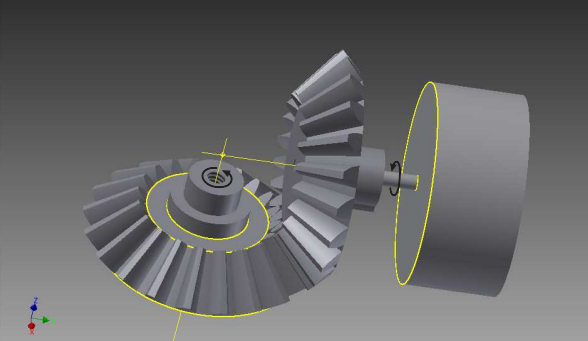
El desarrollo incluyó etapas de diseño mecánico, electrónico y software. Se exploraron distintos mecanismos de inclinación del plano, optándose finalmente por un sistema basado en servomotores y rótulas impresas en 3D, por su estabilidad y menor complejidad mecánica.
La captura de la posición de la bola se realizó mediante una cámara web y procesamiento digital de imágenes en Matlab, lo cual permitió determinar las coordenadas X e Y de la bola en el plano y alimentar las estrategias de control.
Dos tipos de controladores fueron implementados:
- Un controlador difuso, capaz de gestionar la incertidumbre inherente al sistema y adaptar la respuesta de control ante variaciones dinámicas.
- Un controlador por realimentación de estados, que permitió una respuesta más precisa basada en el modelo matemático estimado del sistema.
Resultados y Relevancia
El sistema desarrollado permitió validar de manera experimental los resultados obtenidos en simulaciones, evidenciando diferencias y retos entre el comportamiento real y el modelado matemático. Los ensayos demostraron la efectividad del control difuso y de la realimentación de estados en el mantenimiento de la posición de la bola sobre el plano, aunque cada técnica presentó ventajas específicas en distintos escenarios.
Este trabajo se constituyó en una valiosa herramienta didáctica, al facilitar la enseñanza práctica de conceptos complejos de control y modelado de sistemas dinámicos no lineales. Además, contribuyó a la producción académica del grupo IDEAS y al fortalecimiento de las competencias técnicas de sus integrantes.
Desde el Grupo IDEAS felicitamos a Juan Felipe y Diego, así como a la profesora Diana Marcela Ovalle, por este importante logro, que refuerza nuestro compromiso con la investigación aplicada y la formación de ingenieros capaces de afrontar los retos tecnológicos de la actualidad.













